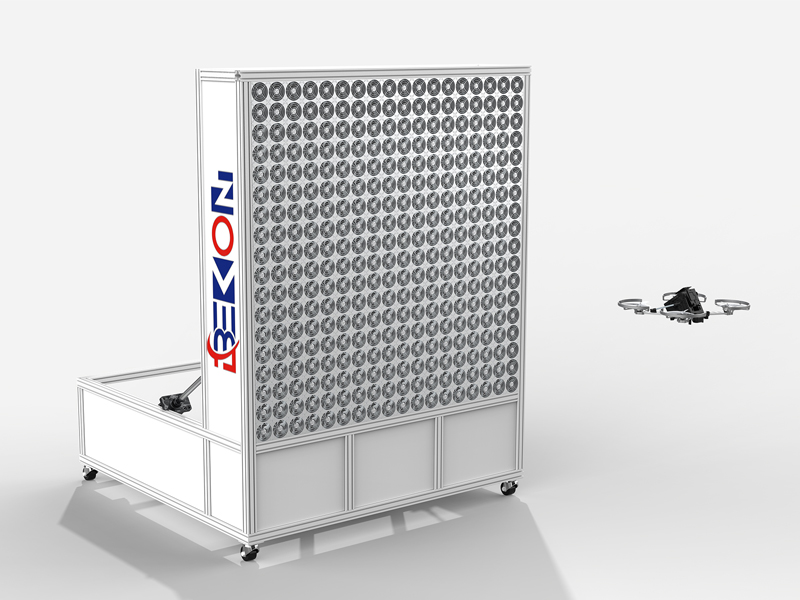
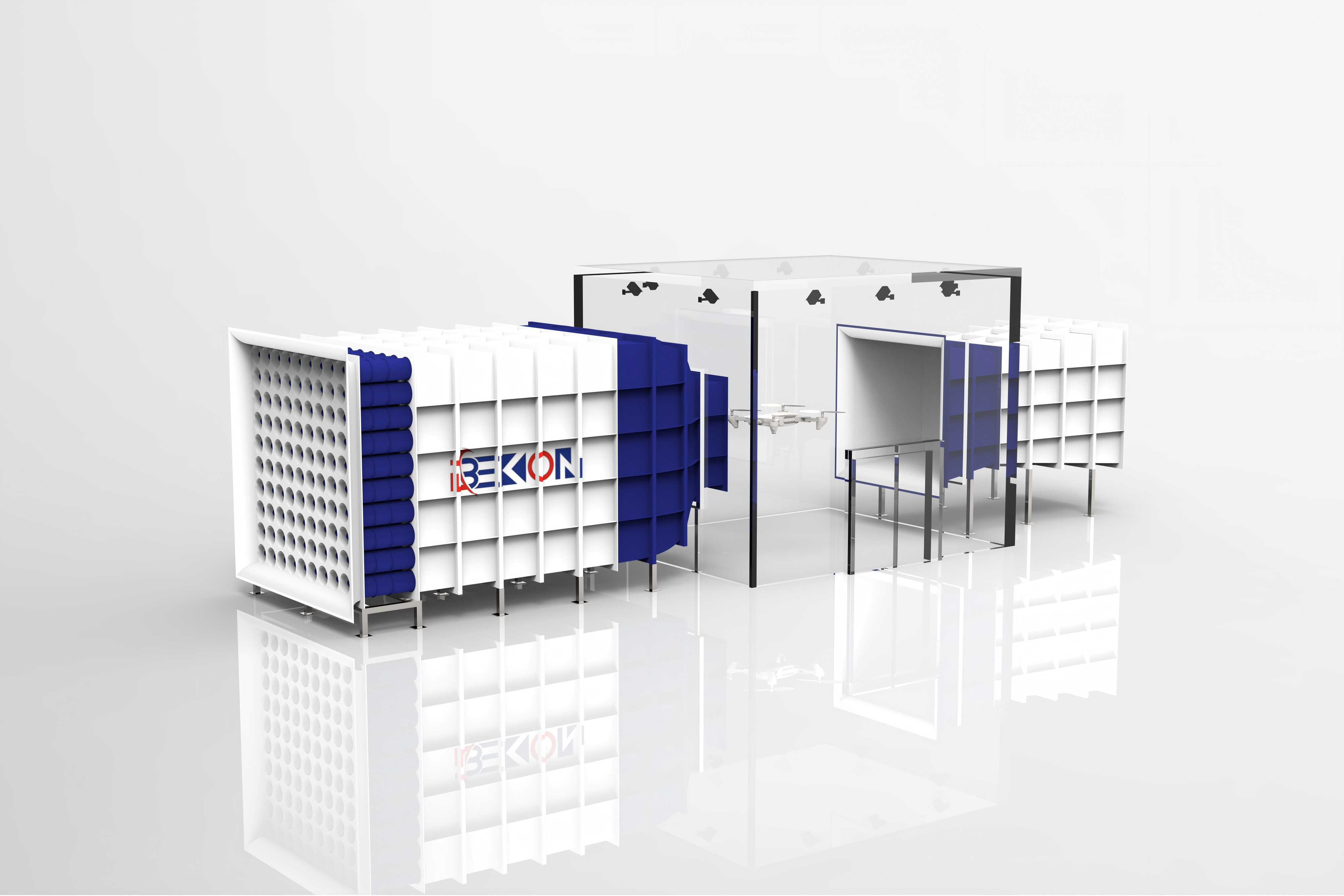
BLWT-3000/3000无人机测试风洞是开口直流或回流风洞,主要由洞体结构、风机阵列、无人机室内空间定位姿态测试系统、风洞控制柜、控制台、配套测量仪器等组成,能够模拟多种复杂气流的风场环境,为无人机的研发提供了强有力的技术支持。在无人机测试中,风机阵列或风场模拟装置控制配合风洞产生无人机测试用的定常风(持续风)、非定常风、阵风、切向风、常规风谱等。也可用于航天航空、军事、民用、农业等领域结构的测力、测压、测振实验和风环境实验以及其他工业空气动力学实验。
参照标准:
GJB 1179A-2012《高速风洞和低速风洞流场品质规范》
QX/T 84-2007《气象低速风洞性能测试规范》
QX/T 323-2016《气象低速风洞技术条件》
GB/T 38058-2019《民用多旋翼无人机系统试验方法》
GB 42590-2023《民用无人驾驶航空器系统安全要求(OCR)》
GB/T 38930-2020《民用轻小型无人机系统抗风性要求及试验方法》
咨询热线:
| 项目 | 技术指标 | |
| 结构形式 | 开口直流/回流风洞 | |
| 试验段尺寸 | 3m×3m(根据客户要求定制如下尺寸:2×2m、4×4m、5×5m、6×6m、8×6m等) | |
| 试验段流速范围 | (1~25~50)m/s | |
| 流场不均匀性 | ≤2.0% | ≤1.0% |
| 动压场稳定性系数 | ≤1.5% | ≤0.5% |
| 湍流度 | ε≤1.5% | ε≤0.5% |
| 气流偏角 | △α≤1.0º,△β≤1.0º | △α≤0.5º,△β≤0.5º |
| 轴向静压梯度 | L·|dp/dx|≤0.01/m | L·|dp/dx|≤0.005/m |
| 风洞结构尺寸 | 11.5m×6.2m×5.6m / 4.5m×4m×3.5m | |
| 配电 | 380VAC/ KW | |
| 复杂气流模拟装置 | 风机阵列或风场模拟装置,复杂气流模拟控制系统 | |
| 名称 | 仪器参数 |
| 控制柜 | 2200(H)×1200(W)×600(D)mm |
| 控制台 | 1500(L)×900(D)×750(H)mm,内置主机,采集模块,控制模块 |
| 温度传感器 | (-40~60)℃ |
| 湿度传感器 | (0~100)%RH |
| 大气压力传感器 | (600~1100)hPa |
| 微压计 | (0~3000)Pa |
| 六分量天平(选配) | Fx、Fy、Fz ±400N,Mx、My、Mz ±100Nm,量程可根据模型确定 |
| 电子压力扫描阀(选配) | 8个模块×64ch/模块=512通道 量程:10英寸H2O 精度:0.05% |
| 激光位移计(选配) | 8~12个通道 测量范围:0~0.1m 测量距离:0~0.5m |
| 眼镜蛇三维脉动风速仪(选配) | 探头数量:2个 频率响应:0-2kHz; 风速范围:2-60m/s; 风速精度:0.5m/s; 风向测量角范围:±45度; |
| 动态信号测试系统(选配) | 16~32通道 测量范围:±100mV、±200mV、±500mV、±1V、±2V、±5V、±10V; |
| 无人机室内空间定位姿态测试系统(选配) | 三维空间物体定位和姿态测试、高速摄像头阵列、测试主机、姿态分析软件 |
● 风洞控制软件具有数据采集、数据处理、风速控制、模型姿态角度控制等功能。设置两种工作模式:风速控制模式和转速控制模式。
● 风洞产生无人机测试用的定常风(持续风)、非定常风、阵风、切向风、常规风谱等。
● 风洞主机控制软件的界面设计开放,便于人机对话,便于修改和设定仪器参数、目标风速、角度、采样时间间隔、存储记录等相关参数和信息。
● 工作过程:系统自动采集记录风洞温湿度、气压、微压计等参数,控制风场到目标风速、角度,测试记录无人机空间姿态和定位、被测件气动性能参数或工作状态等,完成试验数据分析处理。
● 环境模拟:根据风洞配置的环境模块,气压模拟、模拟降雨、降雪、结冰、风沙、高低温环境等,以满足测试环境需求。
Copyright © 2023 百林机电科技(苏州)有限公司 (www.sz-blhk.com ) 苏ICP备18008357号-1

 扫一扫
扫一扫


电话:0512-67519893




